Наилучшим изменением в прежней версии Seafox стало использование погружных насосов Rule 1100 и гребного винта. Доработка насосов сократило их количество до 4 шт , в то время по расчетам требовалось 6 шт движителей, Такого результата получилось добиться используя 3 лопастные 50 мм гребные винты и 42 мм шайбы , Стандартные насосы выдавали где то 228 грамм тяги , а доработанные насосы уже выдавали под 2 кг тяги
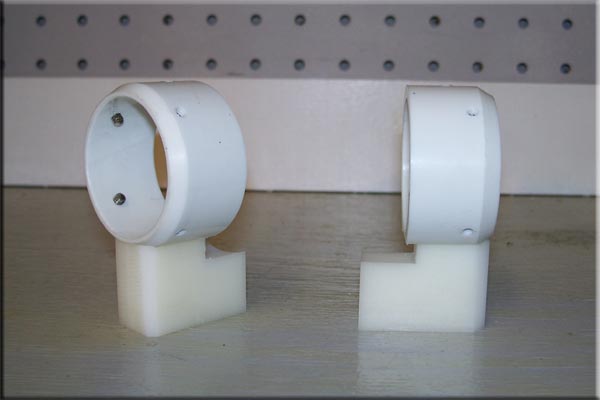
Крепления изготовленные для горизонтальных движителей из ПВХ-труб
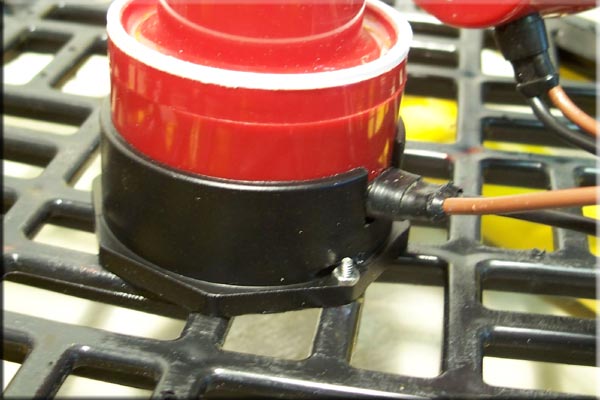
Насос крепиться к основанию платформы
Крепления удерживаются на опорной плите двумя винтами 4/40.
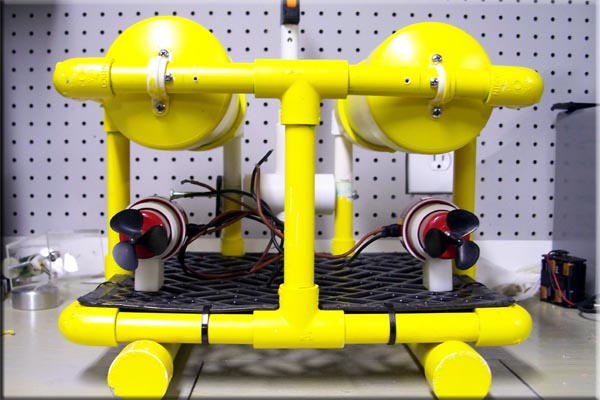
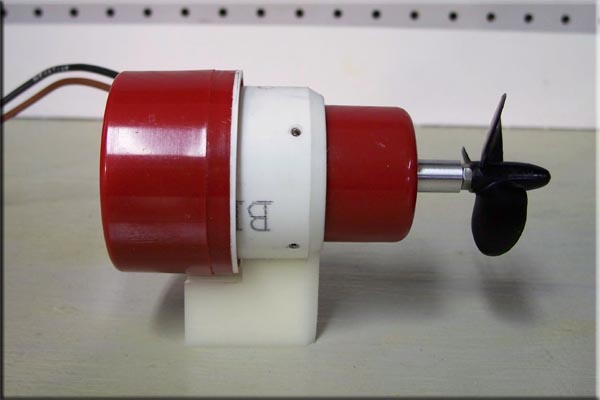
Я использовал встречное вращение винтов, чтобы компенсировать крутящий момент двигателей и поддерживать прямолинейное движение Rov.

Это боковое крепление, которое снова сделано из труб ПВХ и фитингов.
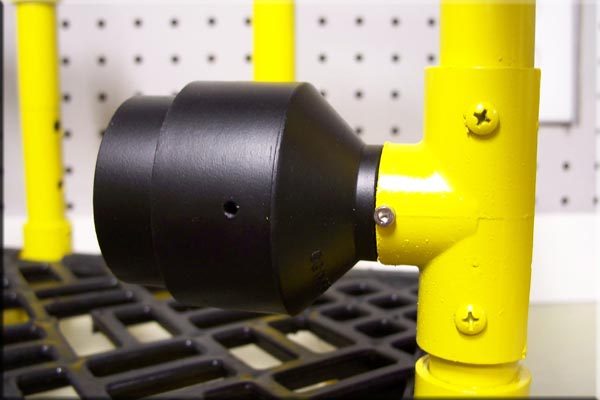
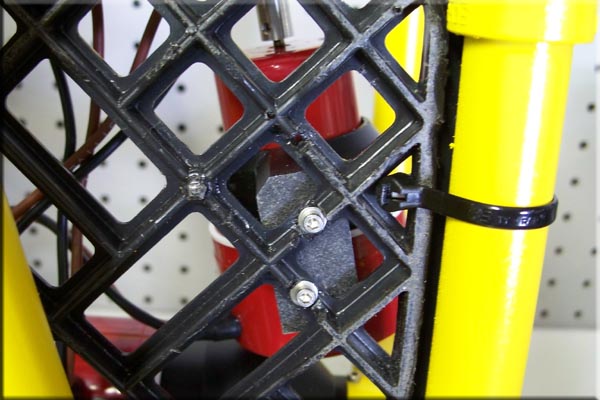
T-образный крепеж крепится к одной из вертикальных опор рамы и завинчивается на раме.

Вал Prop на боковом винте был удлинен, чтобы пройти через весь корпус рамы .
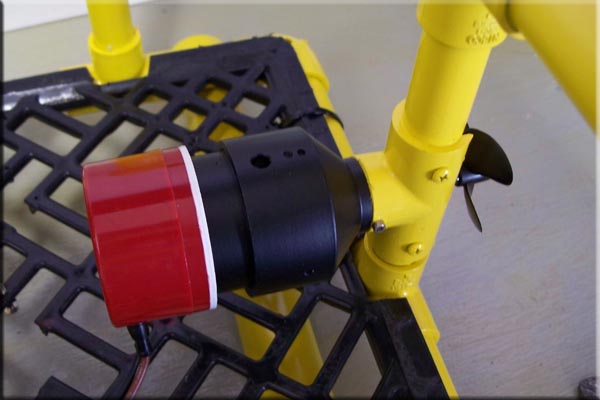
Этот насос также крепиться на раму с помощью 4 винтов. Дополнительные отверстия – для выхода воздух из основания, чтобы не возникало проблем с плавучестью.
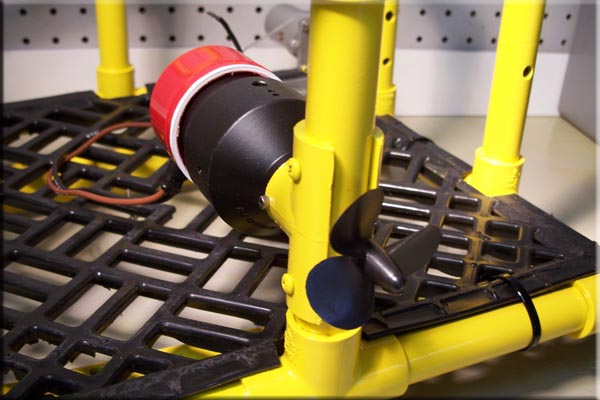
В целом я не доволен этим вариантом установки движителей но, в данном случае у меня действительно не было места, чтобы вместить все 4 движителя внутри рамы.

Вертикальный движитель просто вставляется в фитинг из ПВХ
Этот кронштейн крепится к базовой основе двумя винтами 2/56.

Здесь вы можете увидеть оба двигателя по центру площадке ROVa

Горизонтальные моторы могут быть направлены во внутрь для достижения наилучшего радиуса поворота.