Основная плата
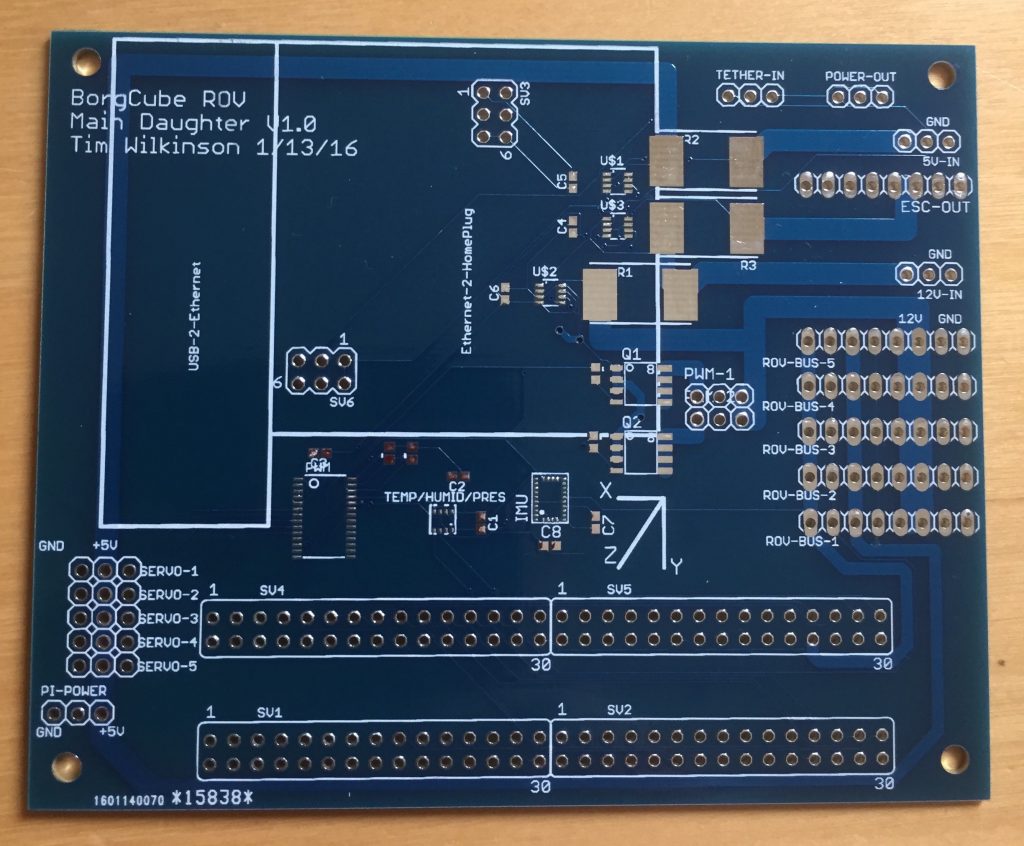
Вчера получил основную плату напечатанную под заказ:
С припаянными элементами:
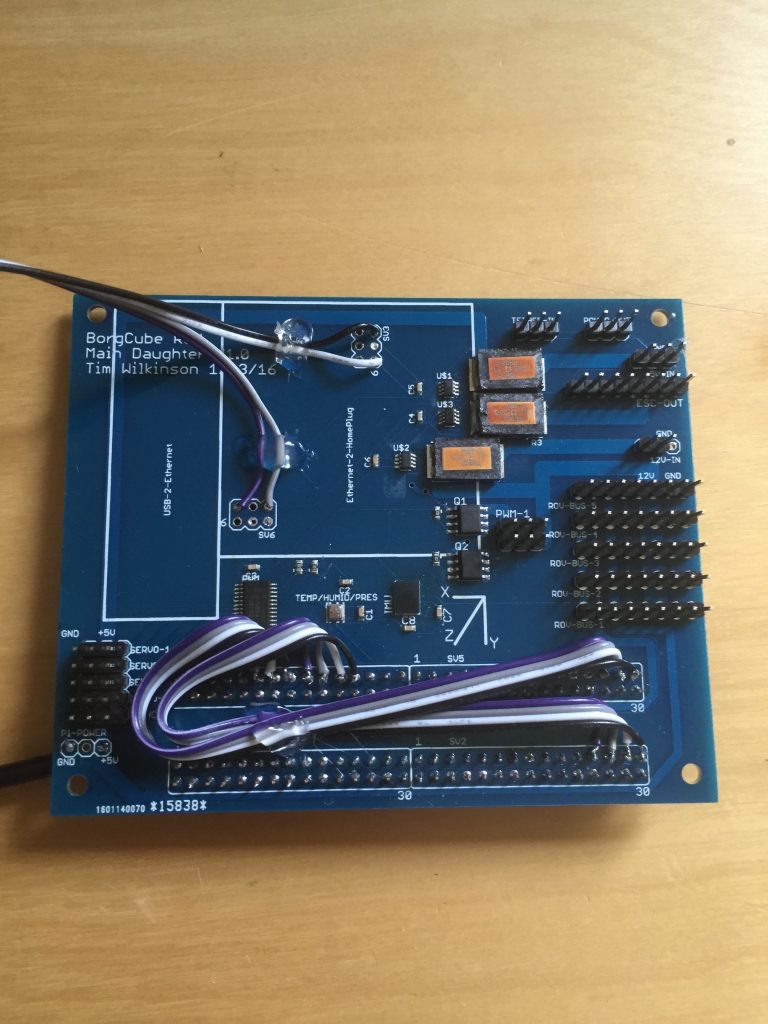
На плате я допустил несколько ошибок (вы можете увидеть провода):
Регулирование мощности
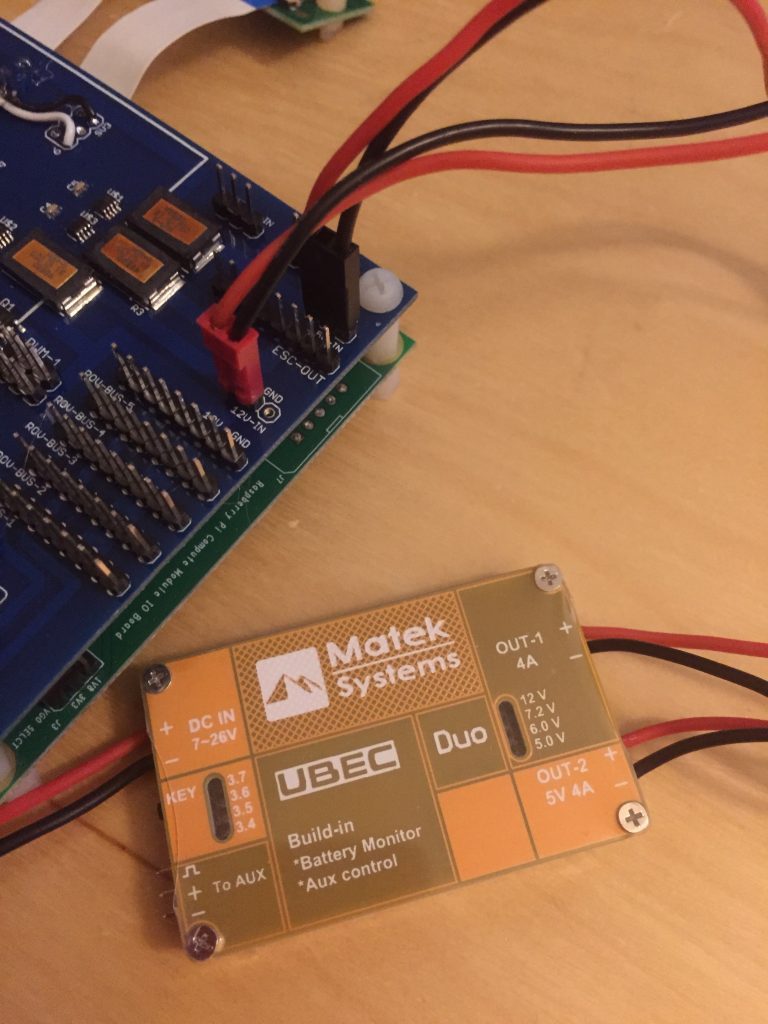
ROV использует три разных напряжения: 3,3 В, 5 В и 12 В. Из них 5 В и 12 В должны быть использованы для основных устройств. Я планирую обеспечить питанием ROVa по кабелю с берега, что означает, что напряжения должны преобразовываться после их поступления в ROV. Чтобы поддерживать постоянное напряжение по 2 жильному кабелю, я намерен подавать его от 12 до 26 В , для того чтобы на борту было стабильное 12 В и 5 В напряжение. Вместо того, чтобы паять схему, я приобрел стабилизатор с переключающим режимом с двумя выходными каналами, работает с входом 7 ~ 26 В постоянного тока Matek Systems . Ниже приведен подключенный стабилизатор с дочерней платой и малиной.
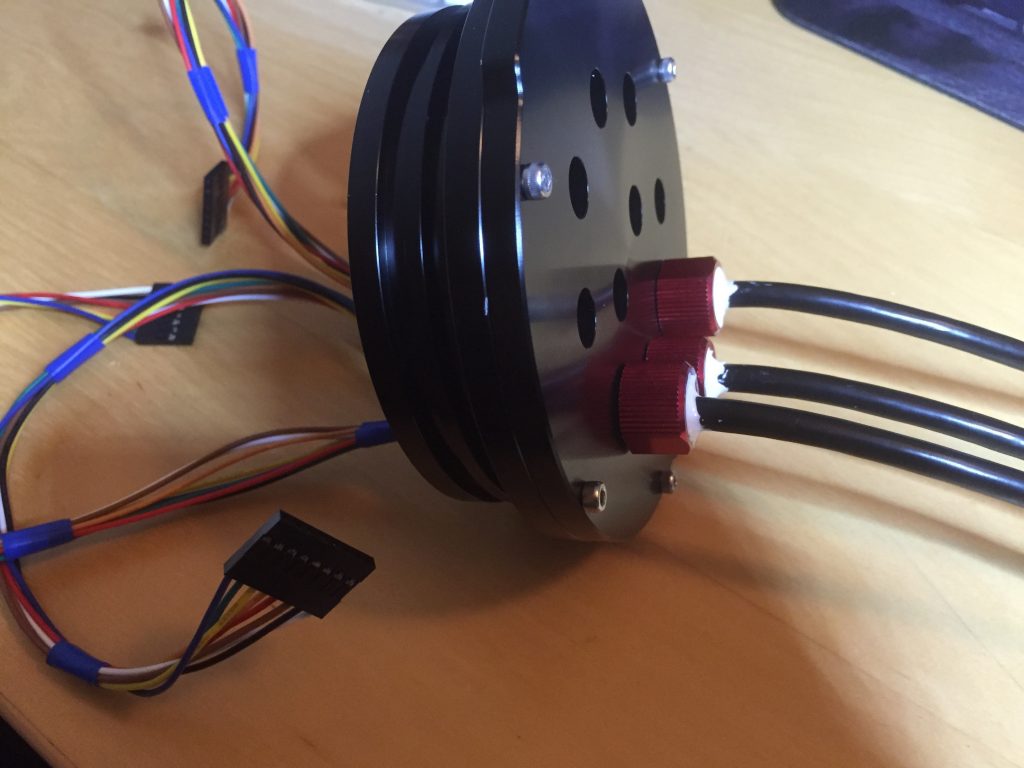
Проникновение кабеля шины ROV
Я использую 8-контактные разъемы IP68 для подключения внешних систем (например манипулятор) к плате Raspberry Pi. Для этого мне нужно запустить этот кабель из мокрой среды в сухую в сам сосуд. Сделал я это используя кабельные пенетраторы от Blue Robotics, которые соединяются с корпусам. Разъем был промазан эпоксидной смолой для предотвращения попадания воды и прикреплены к 8-контактному разъему для удобного крепления / отсоединения их от дочерней платы. В настоящее время мне нужно три из них (см. Фото ниже):
В конце крышки все еще есть много отверстий для силового кабеля и подключения огней.
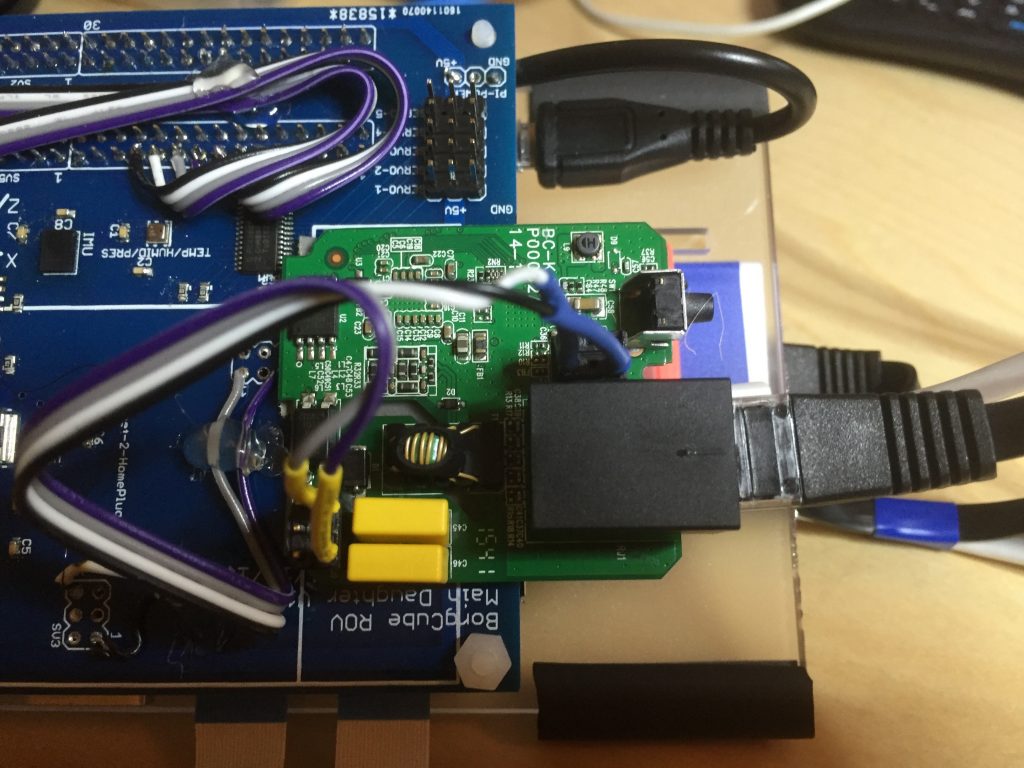
Основная дочка: обновление 2
Сегодня у нас появилась изучить интерфейс Tenda Homeplug. Вся работа была ранее сделана людьми OpenROV, поэтому мне просто пришлось просто ее скопировать. Как сообщалось ранее, мне удалось разместить плату Tenda слишком близко к концу дочерней платы и пришлось использовать кабели для подключения к ней. Также оказалось, что я установил контакт GND на неправильную сторону разъема. Также выяснилось, что я проложил тонкий кабель, для работы плату Tenda, поэтому мне пришлось использовать дополнительный провод для питания.
Все ошибки исправлены, и плата Tenda в ROV теперь стоит на тестовом стенде в моей лаборатории Я также пробовал передать данные по кабелю, и все прекрасно работает.
Движители
В ROV должно быть установлено 12 двигателей. Это означает, что мне нужно выбрать недорогие моторы для этого – покупка 12 двигателей от Blue Robotics обойдется в 2000 долларов, что очень дорого.
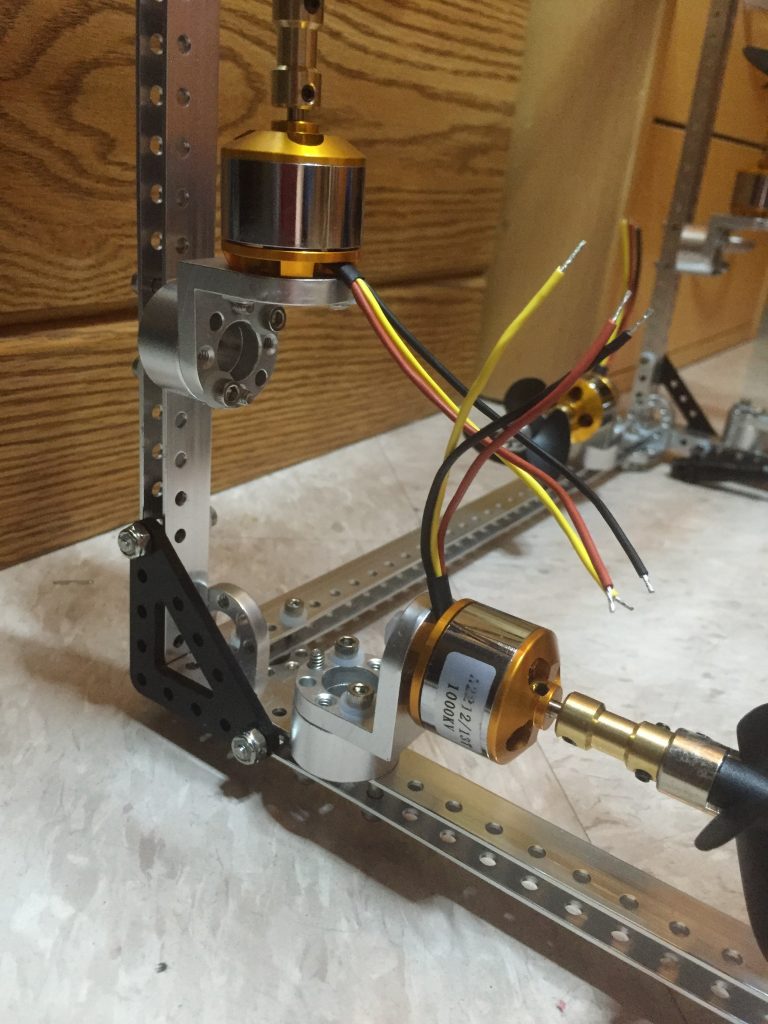
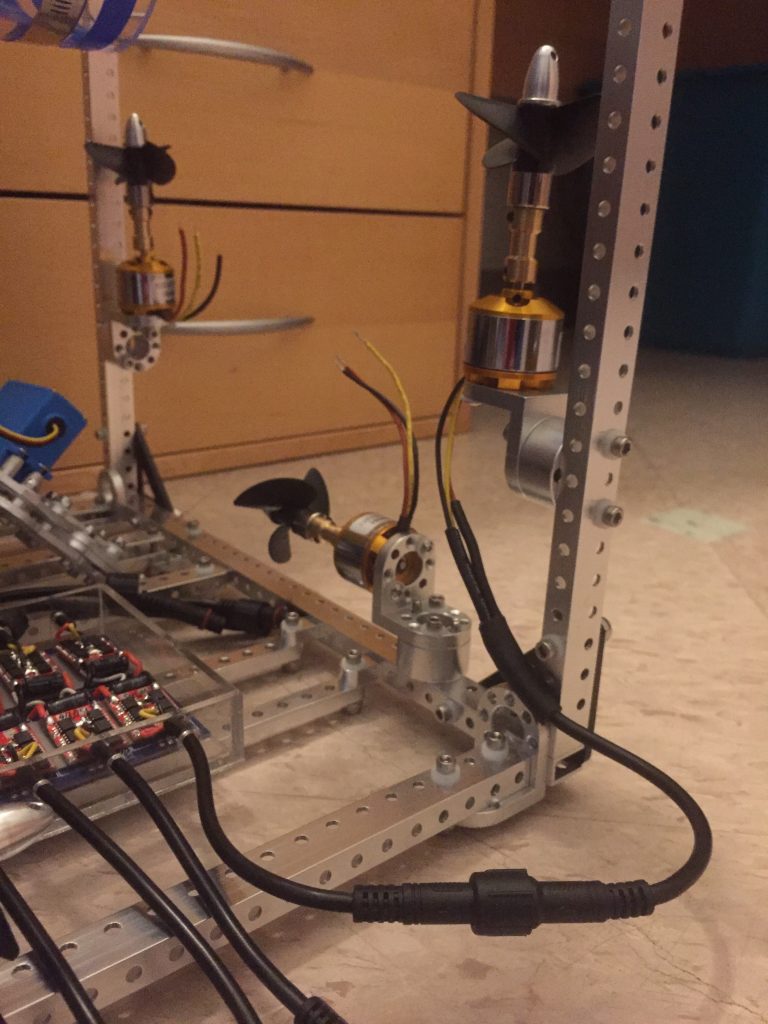
С этой целью я купил двенадцать двигателей A2212 / 13T 1000кВ 6 долларов за двигатель. Чтобы превратить их в подруливающие устройства, мне нужно было добавить гребные винты. Я выбрал P40D47 Three Vanes RC Boat Propeller. Чтобы прикрепить один из опор к двигателю, я использовал вал-муфты и двухсторонние резьбовые шпильки из нержавеющей стали . Смонтированный двигатель показан на фото ниже:

На этой картинке вы можете увидеть алюминиевый кронштейн сделаный с использованием ступицы крепления под углом 90 градусов и алюминиевой прокладки . Винты двигателя на одной стороне ступицы, а проставка привинчена к раме … вот так:
Сейчас винты не защищены.в планах защитить их кожухом от нештатных ситуаций. Последний шаг будет подключить их на плату ESC
Корпус ESC
Я построил 12 модульную ESC-плату и ожидал доставку от Ali Express кабелей разъема. Кабеля прибыли и я используя лазерный резак для резки акриловых частей, из который я соберу корпус для платы ESC. Собранная плата и корпус с разъемами показан ниже:
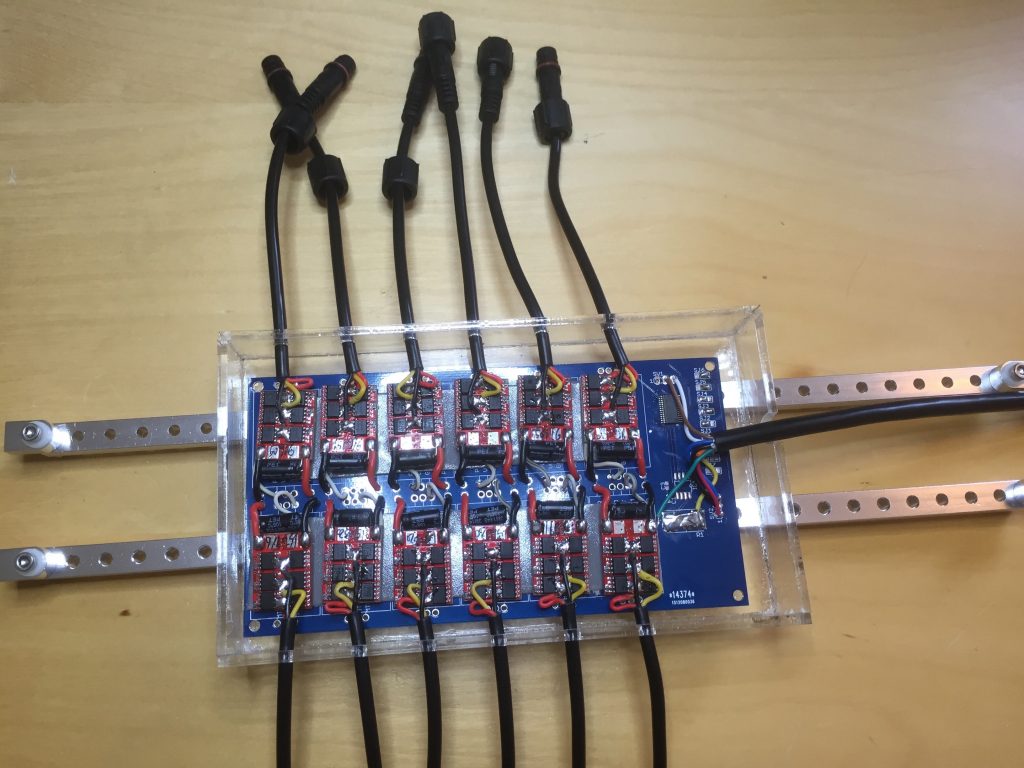
Верхние и нижние разъемы присоединяют ESC к соответствующим двигателям. Правый разъем представляет собой шину ROV и будет прикрепляться к основному сосуду высокого давления где расположен центр управления РОВом. Позже эта конструкция будет заполнена эпоксидной смолой, чтобы обеспечить защиту электроники от воды.
Штекерные разъемы подключаются к разъемам, прикрепленным к двигателям, установленным на раме. Все провода соединены с использованием термоусадки морского класса. Опять же, цель состоит в том, чтобы сохранить эту модульную систему и позволить мне при неисправности двигателей или электроники заменить их.
Проблемы с электропитанием ESC
Сегодня я подключил плату ESC к реальному источнику питания (а не к стенде), и двигатели не смогли запуститься – на самом деле ESC часто перезагружался. Что случилось ? Ну, похоже, что требования к питанию для запуска двигателя не могут быть удовлетворены выбранным мной питанием. Я попытался добавить некоторое количество емких конденсаторов, чтобы убедиться, что это способ поможет при мне запустить двигатели, но и этот способ не сработал. Вернемся к расчетам при подаче напряжения 12В. Я попробую использовать конвертер силой тока 10 А и посмотрю, решит ли это проблему.
Обновление …
Я проверил пусковой ток двигателей (мгновенный ток, необходимый при запуске двигателя), и он равным 3,5 А. Это значение близко к моим 4А.
Альтернативные схемы питания
Учитывая последние проблемы, я начинаю пересматривать текущую стратегию подачи энергии на ROV.
Я сделал расчет о передаваемой энергии по кабелю с берега на РОВ и сделал вывод что : В настоящее время длина моего кабеля составляет 60,96м и толщина 22-мм. Он имеет полное сопротивление 6 Ом. Я планировал использовать большой 4S LiPo аккумулятор в качестве источника питания, давая мне 14,8 В. Это ограничивает ток до 2,5 А … при условии, что я в все силы тока будут направленны через кабель. Регулятор мощности на ROV может преобразовать напряжение 26 В, поэтому моя первая альтернатива – увеличить напряжение передающего кабеля до 26 В. Это ограничивает ток до 4.3A …. со всей мощностью, падающей на кабель. Очевидно, что это не будет решением для платы ESC, так что либо я увеличиваю сечение кабеля, либо увеличиваю напряжение подачи. Увеличение сечения приведет к проблемам плавучести кабеля и его весу соответсвенно (уже вызывает озабоченность)
Итак, пора исследовать установку батареи в ROV.
Корпус движителей
Время дошло до защиты винтов движителей от попадания в них палец, кабелей или других посторонних предметов которые могут быть на дне водоема. Таким образом, у меня были пластик, из которого мне вырезали 12 штук 3,5-дюймовой, 2,5-дюймовой, акриловой трубки, которая помещается вокруг двигателей. Я сделал монтажные отверстия в трубах с помощью лазерной резки. Результаты можно увидеть ниже:

Я не знаю как такой вариант повлияет на эффективность рулевого управления; либо положительно, либо отрицательно.
Верхний тросик
Решив, что ROV будет иметь свою автономную систему питания от аккумуляторов и не будет зависеть от питания по кабелю с земли, я наконец создал прототип передающего кабеля и самой станции. Цель этого – принять сигнал homeplug, преобразовать его в ethernet и подключить к моему ноутбуку. Как это бывает, у моего ноутбука нет Ethernet-порта, поэтому мне также понадобится конвертер USB-to-Ethernet. И это натолкнуло меня понять, что, возможно, я должен установить этот конвертер в мой наземный центр управления РОВом. Результат выглядит следующим образом:
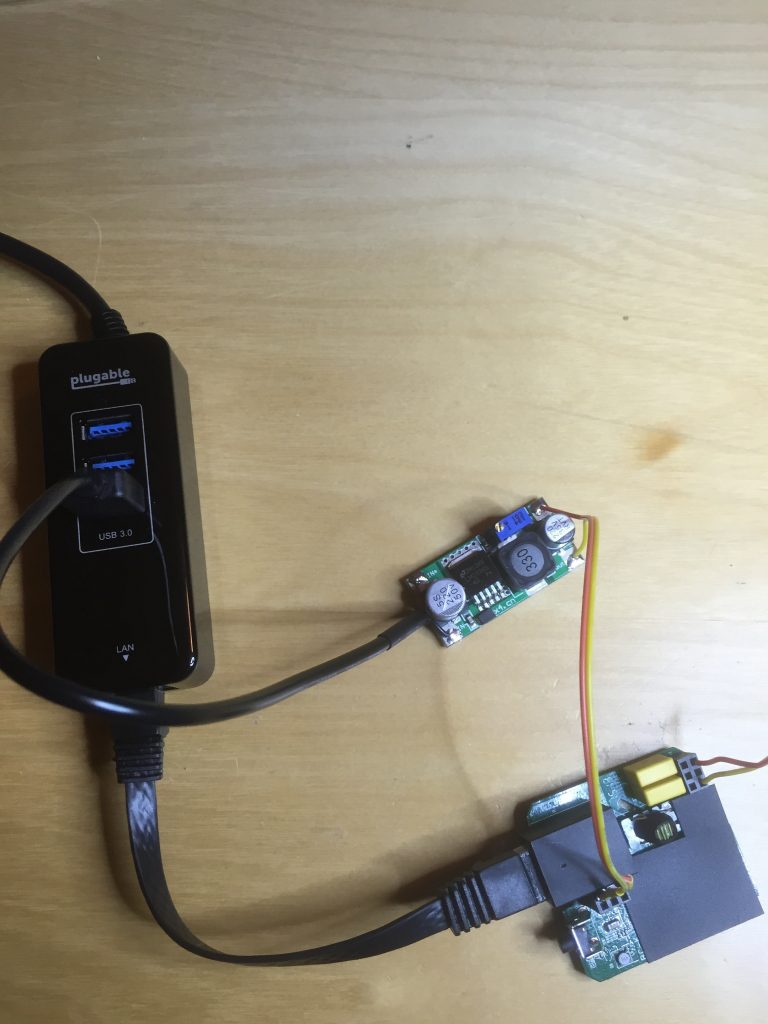
USB-концентратор + ethernet подключается к ноутбуку, а ethernet подключается к homeplug. Я также добавил USB-конвертер 5v-to-3.3v с питанием от USB для питания платы. Теперь мне нужно собрать все это.
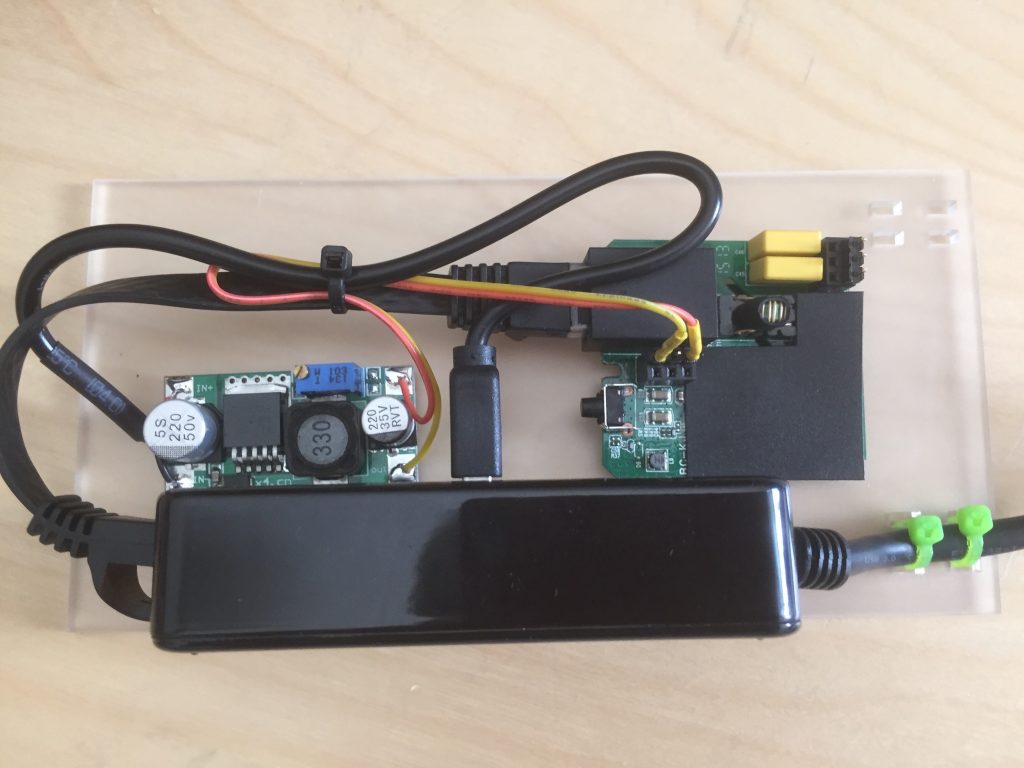
Обновление: установлено
Сервоприводы
Водонепроницаемые сервоприводы я использую немного больше, чем их водонепроницаемые друзья – всего лишь миллиметр, – но этого достаточно что ни один из стандартных монтажных кронштейнов, которые у меня есть, не будет работать. Я изначально смонтировал “руку” используя разные части металлоконструкций, которые были выбраны для временного монтажа, и сейчас мне захотелось получить уже более законченный вид манипулятора
Мне показалось, что я мог просто нарезать новый акриловый монтажный кронштейн – точно так же, как тот, который не совсем подходил, но сделать его немного большим, чтобы сервопривод правильно разместился в нем

На фотографии слева находится кронштейн слева, а акриловая новая скобка справа – альтернатива лазерной резки. Отверстие в центре для сервопривода немного длиннее и шире, но в остальном оно одно и то же. Это означает, что я смогу, наконец, смонтировать сервопривод робота в рамке ROV правильно.
Часть 3 –>