Новый манипулятор был изготовлен из обычных труб и фитингов из ПВХ, я не показал в деталях как работает рычаг, потому что большая часть деталей из ПВХ была подвергнута механической обработке.На схеме нижу приведена схема сбора рычага :

После нескольких просьб по электронной почте я добавил вышеприведенный рисунок, чтобы показать, как все части ПВХ собираются в одно целое. Кусок 3/4 “трубы был на самом деле немного длиннее, чем показано на чертеже, и был короткий кусок другого 3/4” (Coupler) соединителя, который должен был скользить по трубе.

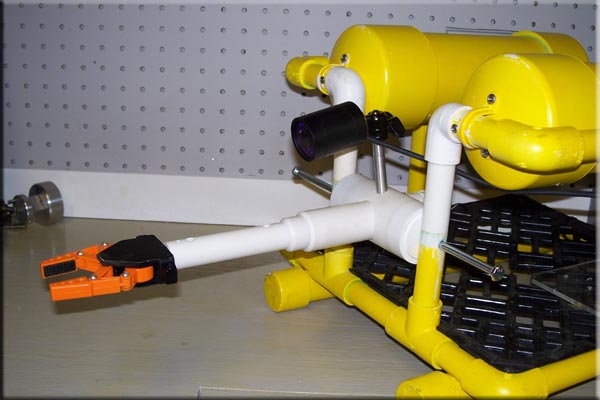
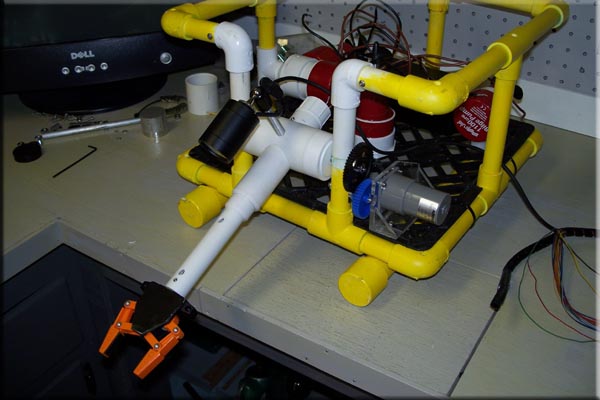
Это завершенный вид манипулятора, алюминиевый стержень, торчащий в середине, является держателем камеры.
Несколько болтов 1/4-20 временно удерживают манипулятор на месте будущей установки.

На этом фото закончена сборка, так же смонтирована камера и конструкция покрашена в четный цвет.

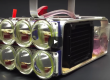
Сам манипулятор используется с первой версии Seafox, который был означали взят с игрушки Radio Shack Armatron. На фото вы можете увидеть, как это работает: Вал поворачивает червячные передачи, которые заставляют “пальцы” открываться и закрываться.
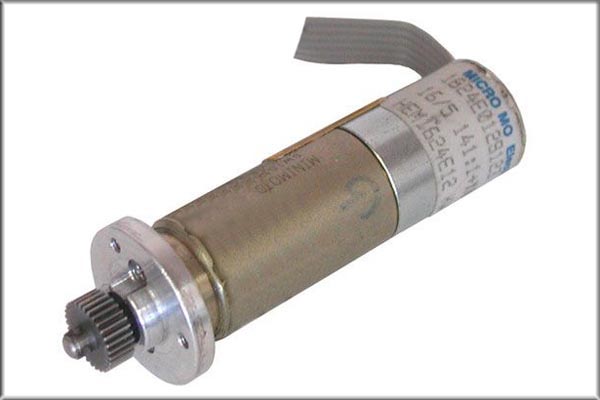
Это мотор-редуктор, который поворачивает основной вал. Передаточное устройство было удалено, и вал и переходник соединяются с стержнем на захвате.
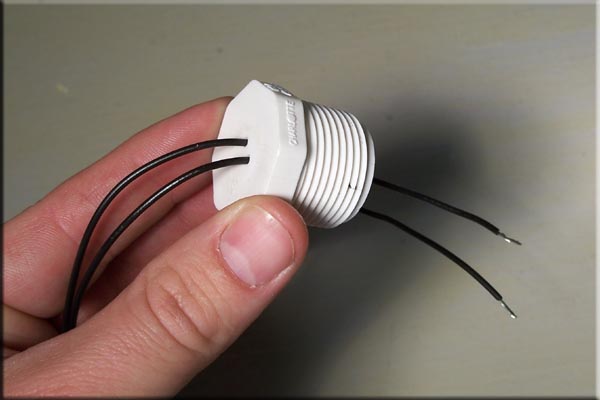
Чтобы закрыть корпус двигателя на манипуляторе, я использовал простую штепсельную вилку из ПВХ, просверлив 2 маленьких отверстий для того чтобы пропустить провод питания через нее .

Затем я добавляю немного силикона в нижней части колбы. Это будет нижним основание заливки

Заключительный шаг – заполнить остальную часть колбы эпоксидной смолой для того что бы избежать попадание воды на больших глубинах.

Затем провода припаиваются к двигателю, и я предварительно закручиваю штепсельную вилку и провода на несколько оборотов, чтобы избежать перекручивание проводов внутри корпуса при полном закручивании.

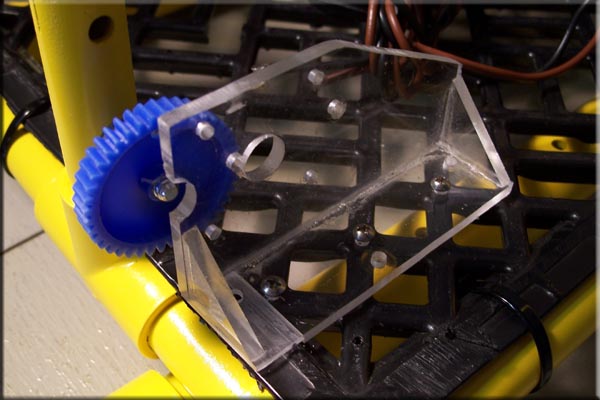
Зубчатая шестерня и вал, крепится к основанию для поворота рычага поднимания и опускания манипулятора .


Следующий комплект передач прикреплен к ПВХ-раме с помощью винта 6/32, который позволяет свободно вращаться шестерне .
Это крепление для мотор-редуктора, которое будет вращать весь узел рычага.
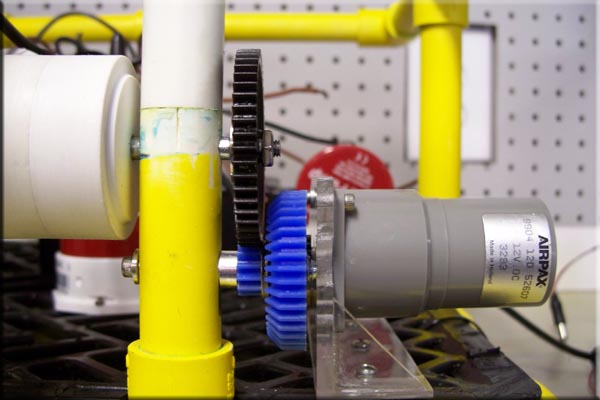
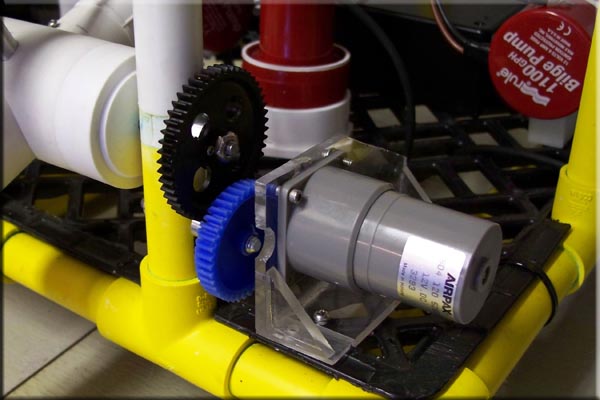
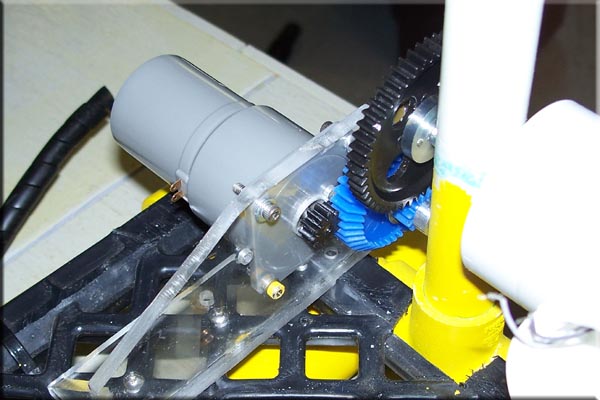
Я использовал двигатель Airpax 12VDC Gearhead и 4 шестерни, чтобы получить нужную скорость наклона.
Вот и готовый манипулятор в сборе с настроенной камерой. Основная идея этого проекта заключалась в том, чтобы облегчить подъем нужных объектов со дна водоёма. Благодаря возможности наклона рукоятки манипулятора вверх или вниз я могу теперь легко извлекать объекты не маневрируя самим ROV, так же большой плюс этого метода в том что не поднимается ил от двигателей ROVa, пытаясь маневрировать им.

На этом рисунке показано, как манипулятор можно поворачивать вручную, здесь захваты находятся в вертикальном положении, но их можно поворачивать под любым углом в зависимости от требований погружения. Единственным недостатком является то, что я должен поднимать подводный аппарат на сушу, чтобы вручную изменять угол. В планах я планирую добавить еще один мотор, чтобы можно было изменить угол на лету, не поднимая ROV на поверхность.
Видео первого теста, в том числе то, как выглядит вид с камеры.